스테이크 취급 시스템

도전과제
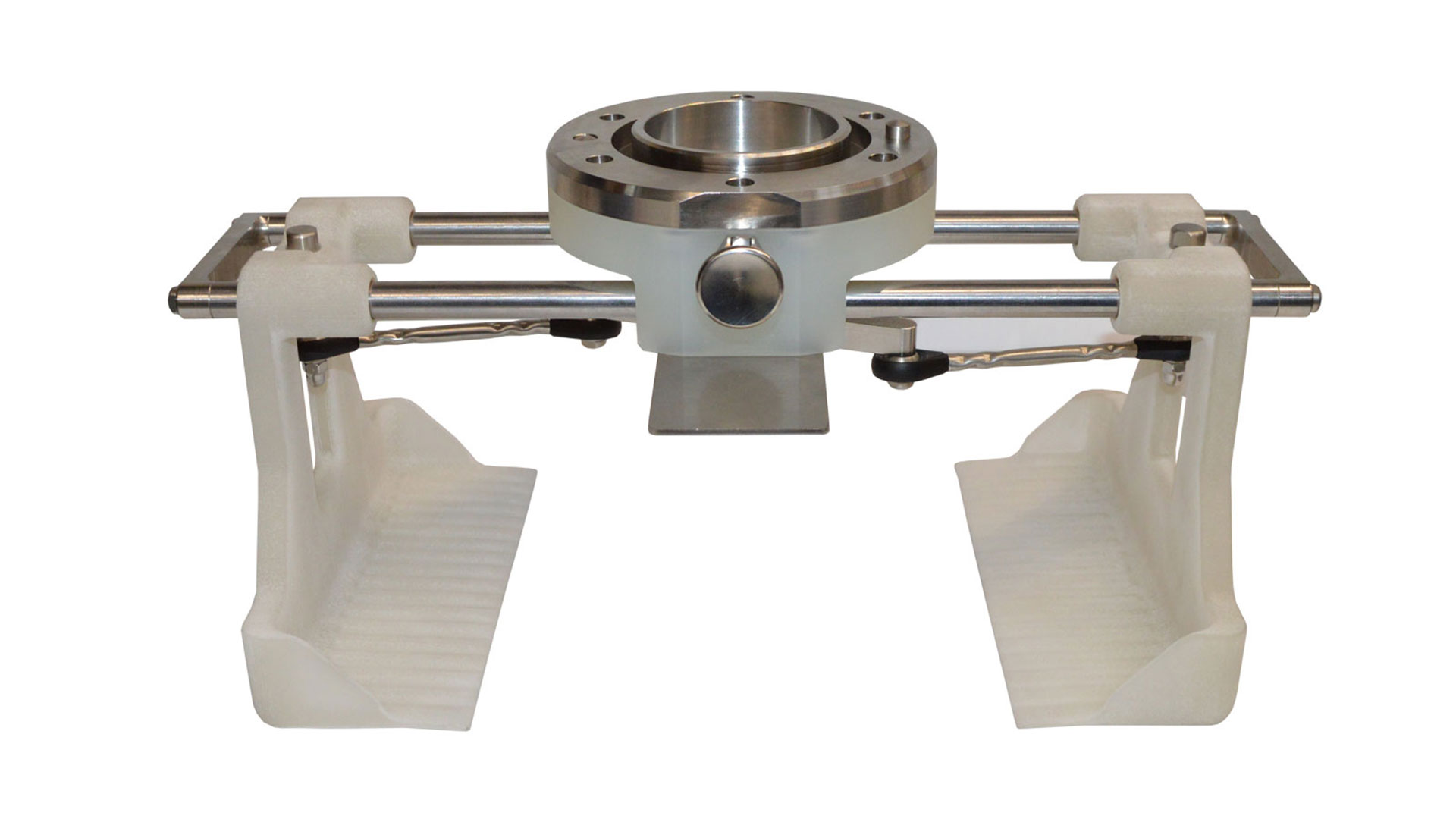
컨베이어 벨트에서 포장까지 원재료를 취급합니다. 그리퍼 자체에는 자체 구동 장치가 없기 때문에 플렉스피커에 통합된 회전축을 통해 제어됩니다.
해결책
해결책은 식품과 호환되는 부품 설계에 있습니다. 또한 로봇의 회전축과 그리퍼 운동학을 직접 연결할 수 있는 인터페이스를 만들었습니다.
컨베이어 벨트에서 포장까지 원재료를 취급합니다. 그리퍼 자체에는 자체 구동 장치가 없기 때문에 플렉스피커에 통합된 회전축을 통해 제어됩니다.
해결책은 식품과 호환되는 부품 설계에 있습니다. 또한 로봇의 회전축과 그리퍼 운동학을 직접 연결할 수 있는 인터페이스를 만들었습니다.